数组的定义
一维数组:是一个定长线性表$(a_1,a_2,…,a_n)$
记为:$A=(a_1,a_2,…,a_n)$
其中:$a_i$为数据元素,$i$为下标/序号,$1\le i\le n$
二维数组是一个定长线性表
$A=(\alpha_1,\alpha_2,…,\alpha_m)$这里每个元素$\alpha_i$代表矩阵的一行
$A=(\beta_1,\beta_2,…,\beta_n)$这里每个元素$\beta_j$代表矩阵的一列
数组的操作
1 | InitArray(&A,n,bound1,...,boundn); //创建一个n维数组,各维长度通过boundi表示 |
数组的顺序表示和实现
数组的物理结构
因素:
- 分配连续的存储单元成非连续的存储单元;
- 保存全部数组元素成部分的数组元素。
一维数组的顺序表示
一维数组$A=(a_1,a_2,…,a_n)$
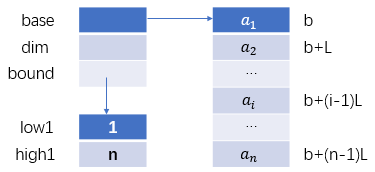
一维数组数据元素$a_i$的地址计算公式
$LOC(i)=b+(i-1)L=LOC(1)+(i-1)L$
其中:$LOC(i)$为元素$a_i$的存储位置,b是连续存储单元首地址,L是一个数据元素所占的单元数。
二维数组的顺序表示
步骤:
计算需要分配多大的连续空间,才能保存所有的数据元素。
存放方式,一种是逐行存放,称为行序优先。还有一种是逐列存放,我们也称为列序优先。
以行序为主序的顺序存储方式
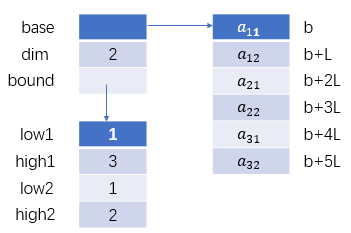
$A_{m*n}$需要考虑:
分配空间;明确分配多大连续空间。这里共需要开辟$m*n$个数据元素的连续空间。
确定存放方式,首先以行序优先逐行存放。
分析数据元素$a_{ij}$的计算空间。
当采用逐行存放方式时,前面有$i$行,每行有$n$个数据元素,共有$i*n$个数据元素。
而在第$i$行中,$a_{ij}$前面还需要存放$j$个数据元素。
这样在前面存放的数据元素的总个数是$i*n+j$。所以$a_{ij}$的地址计算公式为:
考虑列序优先,逐列存放时,前面有$j$列,每列有$m$个数据元素,共有$j*m$个数据元素。
而在第$j$列中,$a_{ij}$前面还需要存放$i$个数据元素。
这样在前面存放的数据元素的总个数是$j*m+i$。所以$a_{ij}$的地址计算公式为:
对任意一个数组元素$A[i_1,i_2,…,i_n]$,可得到行序优先的寻址方式为
特殊矩阵的压缩存储
n阶对称矩阵
$a_{ij}=a_{ji}$,$i\le m,j\le n$
下三角元素$a_{ij}$满足$i\ge j$
数据元素的个数$=1+2+…+n=n(n+1)/2$
假定以行序为主,顺序存储下三角元素到$SA[1…n(n+1)/2]$
设$a_{ij}$在下三角,$i\ge j$
$\because$第$1$~$i-1$行共有元素$1+2+3+…+(i-1)=i(i-1)/2$个
第$i$行中,$a_{ij}$是第$j$个数据元素,共有$j$个元素
$\therefore$$a_{ij}$的序号为:$k=i(i-1)/2+j$
设$a_{ij}$在上三角,$i\lt j$
$\because$上三角的$a_{ij}$等于下三角的$a_{ji}$
下三角的$a_{ji}$的序号为$k=j(j-1)/2+i$,$i<j$
$\therefore$上三角的$a_{ij}$的序号为$k=j(j-1)/2+i$,$i<j$
由1和2,任意$a_{ij}$在$SA$中的序号,为
该公式称为在$SA$中的映象函数,下标转换公式
三对角矩阵
除了对角的三条元素,其余为0
元素$a_{ij}$在三对角的条件:$|i-j|\le1$;
三对角的元素个数:$3n-2$
假定以行序优先,将三对角元素顺序存储到$SA[1…3n-2]$中
任意三对角元素$a_{ij}$,在$SA$中的序号:
$k=(3*(i-1)-i)+(j-i+2)=2i+j-2$
稀疏矩阵的压缩存储
三元组表
在实际应用中,常常会遇到一种矩阵,零元素很多,非零元素很少,且非零元素在矩阵中的位置没有特定的规律,我们称这种矩阵为稀疏矩阵。
稀疏矩阵没有一个明确的定义,只是从形式上看,非零元素的个数的元素总数的比例低于某特定的定位。
由于非零元素很少,所以只需保存这些非零元素,没有保存的都是零元素。为了标明每个非零元素在矩阵中的位置,我们可以以(行,列,值)形式的三元组形式来保存非零元素。
所有的非零元素的三元组序列加上行数和列数称为三元组表。
三元组顺序表
我们首先考虑的是分配连续的存储空间,保存稀疏矩阵中的三元组表,这种存储结构称之为三元组顺序表。
在三元组顺序表中,首先需要的是一个足够大的三元组数组空间,将非零元素的三元组按行序优先的次序保存在数组中,再就是矩阵的行数,列数和非零元素的个数。
这样三元组顺序表就能唯一地确定稀疏矩阵,逻辑上和物理上就对应起来了。
| 1 | 2 | 33 |
|---|---|---|
| 1 | 3 | 9 |
| 3 | 1 | 10 |
| 3 | 6 | 36 |
| 4 | 3 | 16 |
| 5 | 2 | 28 |
| 6 | 4 | 37 |
| /// | /// | /// |
行数(mu):6
列数(nu):7
非零元(tu):7
数据类型
假定非零元素的个数最大值能达到10000,定义常量
MAXSIZE=10000;定义三元组的结构类型triple;包括非零元素的行位置,列位置,元素值这三个属性。
定义三元组顺序表的结构类型TSMatrix。包括大小为MAXSIZE的三元组数组,行数,列数和非零元素个数几个属性。
1 |
|
十字链表
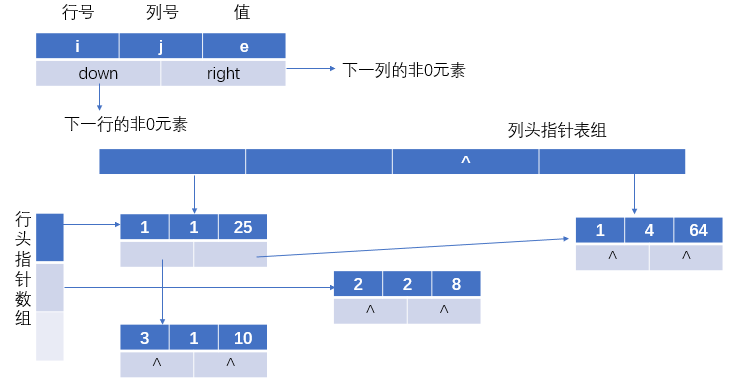
我们把这种物理结构称为十字链表。非常形象地表示了每个非零数据元素的水平方向的关系,行关系,以及垂直方向的关系,列关系。这两种关系十字交叉,所以称为十字链表。
1 | typedef struct OLNode //三元组结点定义 |
稀疏矩阵的转置算法
算法1:
1 | void TransMatrix1(TSMatrix M,TSMatrix &T) |
时间复杂度:$O(M.mu*M.tu)$
算法2:改进算法
1 | void TransMatrix2(TSMatrix M,TSMatrix &T) |