查找问题
“查找”是基于数据逻辑结构(D,R)定义的一种十分常见的运算。数学上,“查找”是指问题:“$x\in D ?$”。即查找是确定某个数据元素是否在数据元素上的问题。
如果R限定的关系为D中的数据元素构成一个集合的话,此时称为查找表(Search Table),即查找表定义为同一类型的数据元素(或记录)构成的集合。
通常,$D=\{ a_1,a_2,…,a_i,…,a_n\}$的每个数据元素$a_i$具有唯一标识的分量,被称为关键字,记为:$a_1.key$。
用以识别若干数据元素(或记录)的数据称为次关键字。
如果D中存在给定关键字的数据元素,则称为“查找成功”,否则称为“查找失败”。
查找运算的一般定义形式为Search(T,x.key),Search(T,x.key)的返回值,通常采用下列3种形式之一。
对于查找表可以进行的操作有:
- 查询某个特定的数据元素是否在查找表中;
- 检查某个特定的数据元素的各种属性;
- 在查找表中插入一个数据元素;
- 从查找表中删除某个数据元素。
如果限定对于某个查找表,只允许执行第1和第2种操作,称为静态查找表,即静态查找表内容不允许发生改变。否则,如果查找表同时允许执行第1、第2、第3和第4种操作,则称其为动态查找表。
$T(n)$:在查找表中查找某一元素的时间开销计为$T(n)$,其通常与问题规模$n$相关,$n$定义为查找表中数据元素的个数。
$T_{best}(n)$:指最好情况下的时间开销;
$T_{worst}(n)$:指最坏情况下的时间开销;
对于基本“计较”操作实现的查找算法,时间开销$T(n)$主要来源于关键字值K,往往需要跟查找表中的多个数据元素的关键字值进行比较,称这种关键字值比较次数的数学期望值为平均查找长度(Average Search Length),记为ASL。
顺序表的查找
哨兵技术
- 首先将待查找的那个数据元素存放在顺表表的边界,即执行赋值语句
a[0]=x; - 然后从
a[n]开始进行逆序方向进行查找。
“查找成功”的情况
| 查找成功的位置 | 关键字比较的次数 |
|---|---|
| n | 1 |
| n-1 | 2 |
| n-2 | 3 |
| … | … |
| i | n-i+1 |
| … | … |
| 3 | n-2 |
| 2 | n-1 |
| 1 | n |
平均查找长度:$T_{average}(n)=O(n)$
“查找失败”的情况
在“查找失败”的情况下,需要与所有关键字比较一次,共计n次。
折半查找法
适用于有序表,这里用递增有序表来讲解。
算法思想:与处于查找表中间位置关键字比较。如果等于给定值,则查找成功,返回成功值;如果大于给定值,在表的左部折半法查找;如果小于给定值,在表的右部折半法查找;仅当左部或右部为空时候,查找失败,返回失败值。
公式:$mid=(low+high)/2$
顺序查找表的左半部分查找,$low$不变,$high$为$mid-1$;
顺序查找表的右半部分查找,$high$不变,$low$为$mid+1$;
$low\leq high$时,表示顺序查找子表非空,如果没查到数据元素,可以继续查找。
1 | Typedef struct |
算法分析:规模为表长$n$,统计关键字之间的比较次数。
最少的比较次数是1次,最多比较次数是树的高度。
即:$T_{best}(n)=O(1), T_{worst}(n)=O(log_2n)$。
分块查找法
利用关键字序列的分段(块)有序性,建立分段(块)索引表。借助分段索引表,实现快速查找。这种方法称为分块查找法。
算法思想:
- 在分段索引表中“顺序”或“折半”查找给定值所在的块;
- 在1确定的块中,顺序查找给定值。
算法分析:假设在索引表上的平均查找长度为$ASL_b$,在查找表上的平均查找长度为$ASL_w$,则
顺序查找法确定块
显然,当$s=\sqrt{n}$时,$ASL$达到最小值。
折半查找法确定块
分块查找法需要划分块,建立分块索引表。其中,分块要求查找表呈现分块有序性,分块有序性通常属于“自然天成”的。(例如:高校历届毕业生的归档资料)。
分块查找法可以推广,可以建立多级分块查找法。
二叉排序树
一棵二叉排序树或者是一棵空树,或者是满足下列性质的一棵非空的二叉树T:
- 如果T的左子树非空,则左子树中所有结点值小于T的的根节点的值;
- 如果T的右子树非空,则右子树所有结点值大于T的根节点值;
- T的左子树和右子树均为二叉排序树。
二叉排序树“查找”算法
1 | BiTree *Locate(BiTree *T, KeyType K) |
二叉排序树“插入”算法
Insert(&T, K)
T表示一棵已经存在的一棵二叉排序树的根节点,K为待插入的数据元素的关键字。
根据给定的关键字K,在T为根节点的二叉排序树中查找,并在失败处插入该元素。
二叉排序树“创建”算法
基本思想:先初始化一棵二叉排序树的根节点为空。然后不断地往这棵二叉排序树中,根据查找表中数据元素顺序插入数据元素。
二叉排序树“删除”算法
假设二叉树排序树上被删除节点为*p,其双亲节点为*f,且不失一般性,假设*p是*f的左孩子。
二叉排序树节点的“删除”,可以分为4种情况分别进行处理。
情况一:待“删除”的结点,左右子树均为空子树。修改其双亲节点的指针实现删除结点。
情况二:待“删除”的结点*p,其左子树为空子树,右子树为非空子树Pr。将Pr成为*f的左子树即可。
情况三:“删除”的结点*p,其左子树为非空子树Pl,右子树为空子树。将Pl成为*f的左子树即可。
情况四:待“删除”的结点左右子树均为非空子树。被删除节点为*p,其双亲节点为*f,且不失一般性,假设*p是*f的左孩子。结点*s是被删除结点*p的左孩子节点的右子树中的,沿着右孩子指针路径下去的,直到无右孩子的结点。
- 方法一:删除结点
P,令*p的左子树为*f的左子树,而*p的右子树为*s的右子树。 - 方法二:结点
*s替换结点*p(即删除删除结点P),结点*s的左子树作为结点*s的父结点*q的右子树。
“查找”算法分析
假设二叉排序树有n个结点,最少的比较次数是1次,最多比较次数是树的高度h。
有$T_{best}(n)=O(1),\quad T_{worst}(n)$。
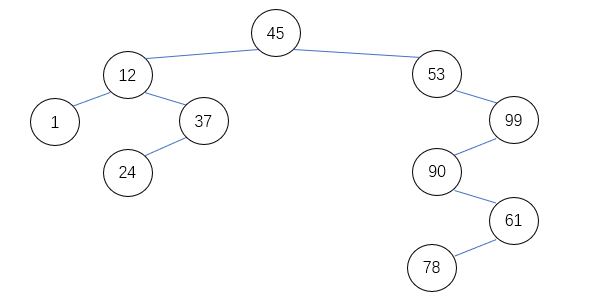
平衡二叉树
平衡二叉树(Balanced Binary Tree)又称为AVL树。它或是一棵空树,或是满足下列性质的一棵非空的二叉树T:
- T的左子树和右子树的深度之差的绝对值不超过1;
- T的左子树和右子树均为平衡二叉树。
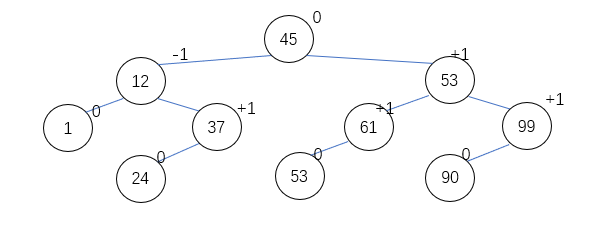
平衡二叉排序树“创建”算法
算法思想:根据关键字序列,对每一个关键字K,逐个在平衡二叉排序树T上查找,在失败处插入该关键字K;如果插入时T失去平衡,对最小不平衡子树进行平衡化处理。
最小不平衡子树:是从插入结点k到二叉平衡树T的根之路劲上,距离结点k最近的、平衡因子绝对值>1的结点为根的子树。
平衡化处理
对于最小不平衡二叉树,可以根据导致失去平衡的插入位置,分为LL型、RR型、LR型和RL型4种情况,并分别进行平衡化处理。
LL型:插入点是最小不平衡子树的左子树的左子树,处理的办法是“单向右旋”。
RR型:插入点是最下不平衡子树的右子树的右子树,处理的办法是“单向左旋”。
LR型:插入点是最小不平衡子树的左子树的右子树。处理的办法是“左旋右旋”。
RL型:插入点是最小不平衡子树的右子树的左子树。处理的办法是“右旋左旋”。
哈希查找法
一个哈希函数$H(k)$的作用是计算关键字K对应的数据元素的存储地址。
这种不依赖与“比较”运算给,而是依靠算术“计算”的查找方法,在理想状况,最坏时间复杂性可以达到常量级,即:$T_{worst}(n)=O(1)$。
- 其定义域要考虑到理论上可能出现的所有关键字。
- 哈希表要考虑存储空间的有效利用和可行性,哈希函数的值域取决于实际上出现关键字的数量,即实际取值范围。
基本原则
“均匀的(Uniform)哈希函数”,避免冲突情况即同义词的过度集中,预期哈希查找的平均时间效率能够到达最佳。
如果对于关键字集合的每个关键字key,经哈希函数$H(key)$映射到哈希地址集合中的任何一个地址之概率是相等的,则称哈希函数$H(key)$为均匀的(Uniform)哈希函数。
哈希函数的构造方法
直接定址法:取关键字的某个线性函数值作为哈希地址。
即:$T_{worst}=O(1)$
- 数字分析法:对于可能出现的关键字集,事先分析这些关键字的每一位,选择其中“若干”“随机”位构成其哈希地址。
- 平方取中法:取关键字平方后的中间若干位为哈希地址。
- 折叠法:将关键字分割成位数相同的若干个段,然后各段叠加求和作为哈希地址。
余数法:取关键字被不大于哈希表长m的某个数p除后的余数为哈希地址。
一般情况下,p为一个质数或为不含小于20质因子的一个合数。
处理冲突的方法
开放地址法
当关键字key在哈希函数$H(key)$出现冲突的情况时,在$H(key)$为起点,取一个增量di,作为下一个探测的位置。即:
对于增量di,可以3种取法:
- 线性探测$d_i=i\quad(i=1,2,3,…,m-1)$
- 二次探测$d_i=1^2,-1^2,2^2,-2^2,3^2,…,\pm k^2,(k\leq m/2)$
- 伪随机探测再散列
再哈希法
但关键字key再哈希函数$H(key)$出现“冲突情况”时,依次采用其它哈希函数$RH_i$计算关键字key的下一个地址,直到冲突不再发生为止。
链地址法
将关键字的同义词存储在各自的单链表中。
公共溢出区法
当增加关键字到哈希表中遇到冲突时,将所有同义词统一存储到“公共溢出区”中。
哈希查找及其分析
哈希“查找”算法
- 在给定关键字key值对应计算的哈希地址$H(key)$处查找;
- 如果查找不成功,根据处理冲突办法确定“下一个地址”处查找;
- 重复第二步,直到查找成功、或遇到“结束标志”为止。
说明:
- “下一个地址”和“结束标志”是由处理冲突办法决定的;
- 查找算法中既使用了“算术”运算,又使用了“比较”运算;
- “插入”算法是在查找失败处增加新关键字;
- “创建”算法可以循环调用“插入”运算实现;
- “删除”运算的实现实在查找成功处删除某个数据元素。对于某些处理冲突的办法,删除实际上是填入“删除标志”。